
Abstract
This chapter presents the
Keywords
- plasma spray process
- robust adaptive control
- ceramic coating
- model reference adaptive control
1. Introduction
Adaptive control is a popular control methodology for various applications due to its unique ability to accommodate system parametric and structural uncertainties caused by payload variations, component failures, and external disturbances [1]. The model reference adaptive control (MRAC) is a well-known adaptive control approach. The controller gains of the MRAC are updated based on the tracking error between the measured outputs of the uncertain system with outputs of the selected reference model such that these gains force the uncertain system to track the reference model adaptively. In many applications, the MRAC performs satisfactorily and achieves asymptotic system performance without excessive reliance on the system models [2]. However, it suffers the lack of robustness properties in the presence of model uncertainty and external disturbances, which result in various instabilities, such as parameter drifts, high-gain instability, instability resulting from fast adaption, and high-frequency instability [3, 4, 5].
For improving the robustness and transient performance and avoiding high-frequency instability in the presence of uncertainties and external disturbances, a significant research effort has been carried out by modifying the adaptive laws of the MRAC and its architecture [6]. First, to improve the robustness, many researchers have proposed various robust MRAC (we referred to as R-MRAC) schemes by modifying the adaptive laws of the MRAC. The R-MRAC using fixed modification [5] achieves the desired robustness and performance without explicit knowledge of plant dynamics and bounds of the external disturbances. The modified MRAC achieves the boundedness of the closed-loop signals; however, the asymptotic convergence of the tracking error in the absence of the disturbances is not achievable. Apart from this, the MRAC and the R-MRAC using modification schemes can create high-frequency oscillations in control responses when the fast adaption using the high adaptive gains is enabled; thus, it leads to process instability. Additionally, the fixed modification can create a steady-state error and often may lead to a bursting phenomenon [5]. Yucelen and Haddad have proposed low-frequency learning to the MRAC to avoid high-frequency oscillation in control responses in the presence of high adaptive gains [2]. In their work, it was implemented to a nonlinear uncertain plant dynamic without a disturbance term. The fast adaption is achieved using high-adaptive gains by filtering out the high-frequency content in the control responses. This scheme preserves the ideal property of the MRAC, that is, the asymptotic convergence of the tracking error to zero in the absence of the disturbance term.
The motivation, then, is to develop a robust adaptive process control scheme with an improved transient performance by overcoming the issues related to the MRAC. This chapter presents a modified robust model reference adaptive control (we call it MR-MRAC) architecture by incorporating two modifications to the MRAC. First, to achieve robustness in the presence of bounded disturbances, the R-MRAC is considered by incorporating
The APSP has become one of the most efficient and reliable techniques to produce a wide variety of coatings, such as low porosity, thermal barrier, wear, and corrosive-resistant coatings, in different applications. The APSP is a common technique to produce ceramic coatings and is capable of producing functionally graded coatings (FGCs) [7]. Due to the demand for high-volume manufacturing of these coatings, reproducibility and repeatability of the coating quality are of prime importance.
As depicted in Figure 1, the APSP includes plasma generation, plasma and in-flight particle interaction, and deposit formation on a substrate. The plasma produced by the injection of Ar and H2 into the torch exits from it at a very high temperature and speed. Powder particles injected into the plasma travel with it to the substrate and, upon impact, are deposited on it. The y- and the z-axes are, respectively, along and perpendicular to the plasma jet. Particles’ axial velocity and temperature are monitored in the 1-cm wide observation window located near the substrate to be coated. Complex interactions between plasma and particles significantly [8, 9], vary coating properties that affect the process repeatability [10]. Due to large velocity and temperature gradients in a plasma jet, even small changes in process parameters can significantly alter mean particles’ states (mean values of temperature, and axial velocity at the instant of striking the substrate), and thus the quality of the coatings [11]. Even with the operating parameters set constant during the process, the particles’ states before impacting the substrate can change over time due to noise variables such as nozzle wear, injector wear, pulsing of powder due to leaks, worn parts in the powder feeder, and powder dampness.
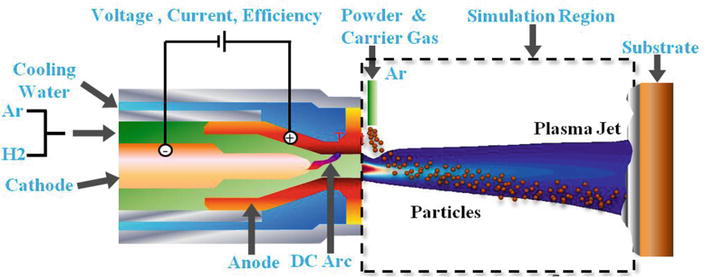
Figure 1.
Schematics of the APSP for producing ceramic coating using a single torch—Single injector system [
We presented the complete details of the design of the adaptive process control for APSP (validation of numerical simulations, screening of process parameters, finding optimal input parameters, system identification, and the control design) are given in Refs. [12] and [13] for ceramic coating using ZrO2 powder with a single torch – single injector system and in Ref. [14] for FGCs using a mixture of the NiCrAlY and the ZrO2 particles with a single torch – two injector system. This chapter discusses the proposed MR-MRAC architecture for generating ceramic coating using ZrO2 powder. The control objective is to maintain the mean axial velocity and temperature of the particles collected in the observation window as the desired values within small bounds by attenuating the influence of external disturbances.
The remainder of this chapter is organized as follows. Section 2 presents preliminaries about the standard MRAC. Section 3 provides the proposed modified robust model reference adaptive control (MR-MRAC) and its stability properties for multi-inputs and multi-outputs (MIMO) linear time-invariant system with bounded external disturbances. The adaptive and robust performance of the proposed controller using numerical simulations for illustrative examples related to the APSP is presented in Section 4. Finally, the conclusions are summarized in Section 5.
2. MRAC problem formulation
We choose the following plant dynamics with
where
The reference model is described as follows:
where
The objective is to design a control input
If the matrices
In the absence of disturbance guarantees that
where
Here,
For any
where
Since
3. Modified robust model reference adaptive control (MR-MRAC) formulation
The foregoing MRAC scheme may suffer from instabilities, such as parameter drift, high gains, and/or fast adaption [16]. Some of these could be avoided using the robust MRAC (R-MRAC) by modifying Eqs. (6)–(9) as proposed by Ioannou and Kokotovic [17].
To prevent the steady-state error due to the
where
The negative gradient of the cost function with respect to gain direction leads to
The implementation of the MR-MRAC to the APSP is the same as that of Refs. [13] and [18] except the following form of the adaptive law is used:
Define
Additionally, the L2 – norm of error is bounded from above for
where
From the error dynamics shown in Eq. (14), we can simplify it as:
Using Eqs. (7), (14) and (19) results as:
for some arbitrary
Therefore, for the adaptive laws shown in Eq. (13), we have
Consequently, the
The system trajectory
To find the L2-norm of tracking error, we start with Eq. (21)
Using inequality regarding the completion of squares
Now integrating with respect to
As we know
With definition
Then, L2-norm of the tracking error is given by
The proof is completed.
Eq. (26) implies that
Figure 2 presents the schematics of the resulting MR-MRAC architecture Eq. (28). For the given reference input signal
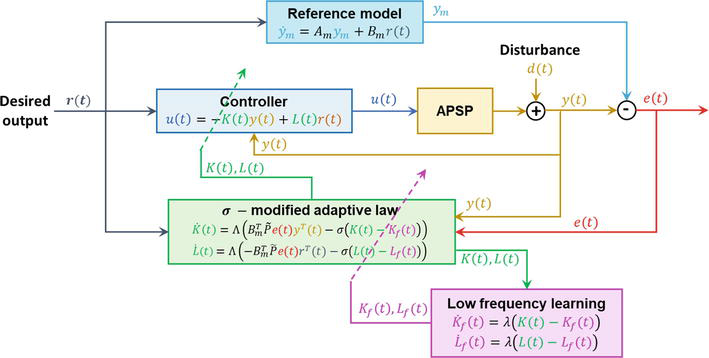
Figure 2.
Schematic of the MR-MRAC architecture [
4. Case studies
Shang et al. [15], among others, have provided a mathematical model for the APSP and the associated numerical model. We use LAVA-P software developed at the Idaho National Engineering and Environmental Laboratory to analyze the three-dimensional motions of powder particles within the plasma. Figure 3 depicts the schematic of the proposed robust adaptive process control using the MR-MRAC for generating consistent quality ceramic coating using a single torch—single injection APSP system. Limits on the input variables with symbols indicated in parentheses are Ar flow rate (
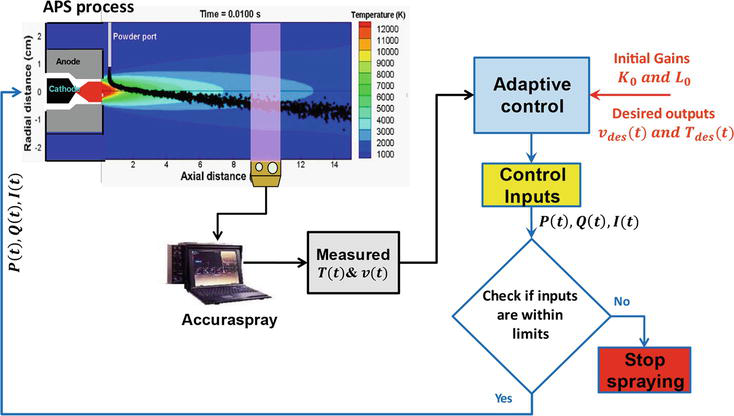
Figure 3.
Schematic of the proposed robust adaptive control scheme for an APSP [
Linearizing the nonlinear dynamics of the mean axial velocity
where
We choose
The objective is to force the measured MPSs
4.1 Performance comparison of MRAC, R-MRAC, and MR-MRAC
For this study, we use the following adaptive gain matrix in Eq. (13):
where
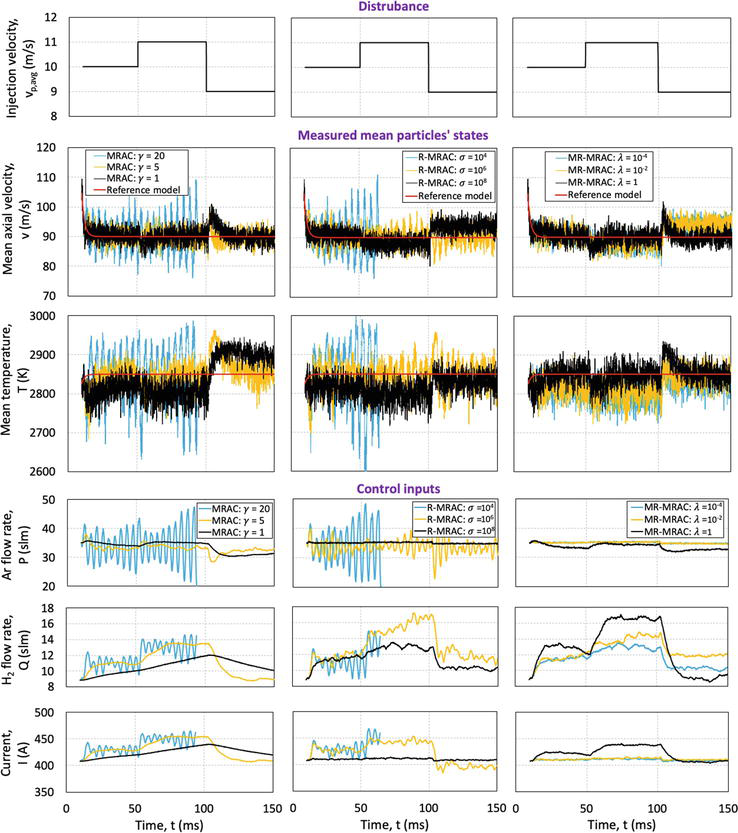
Figure 4.
Effect of adaptive constant
The second column of Figure 4 depicts the effect of damping parameter
The performance of the MR-MRAC is investigated for
4.2 Effect of disturbance variations on performance of MR-MRAC
First, we now check the performance of the MR-MRAC for adaptive tracking when the desired values of mean particles’ states vary with time in the presence of a variation of the disturbance. The following adaptive gain matrix is used for the rest of the analyses:
Here, the damping constant
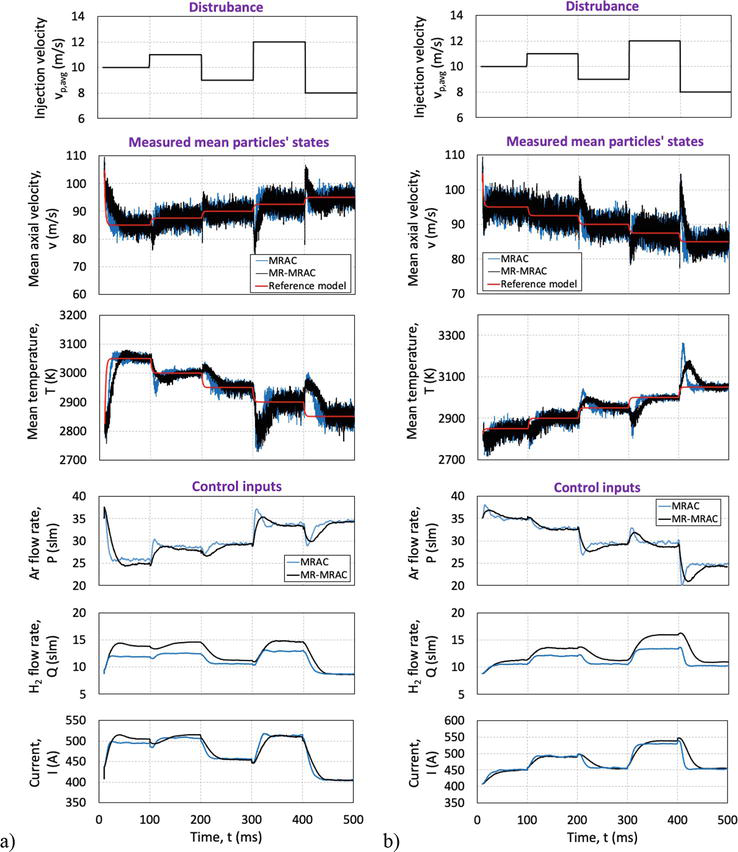
Figure 5.
The closed-loop control responses of MRAC and MR-MRAC for a) increasing desired mean particles’ axial velocity and decreasing desired mean particles’ temperature; and b) the decreasing desired mean particles’ axial velocity but increasing desired mean particles’ temperature in the presence of step disturbance in average injection velocity.
The effect of the simultaneously varied disturbances, such as the average injection velocity of particles and the arc voltages (in the first and the second row of Figure 6), on the mean axial velocity and mean temperature are shown in the third and the fourth rows of Figure 6, respectively. The performance of the MR-MRAC is investigated under these disturbances, and the varied control outputs are shown in the fifth and the sixth rows of Figure 6, and the corresponding control inputs are presented in the remaining rows of Figure 6. These examples establish the effectiveness of the designed process controller in mitigating the effects of various classes of disturbances for generating ceramic coatings using the APSP. Of course, in practice, disturbances are not limited to those stipulated here.
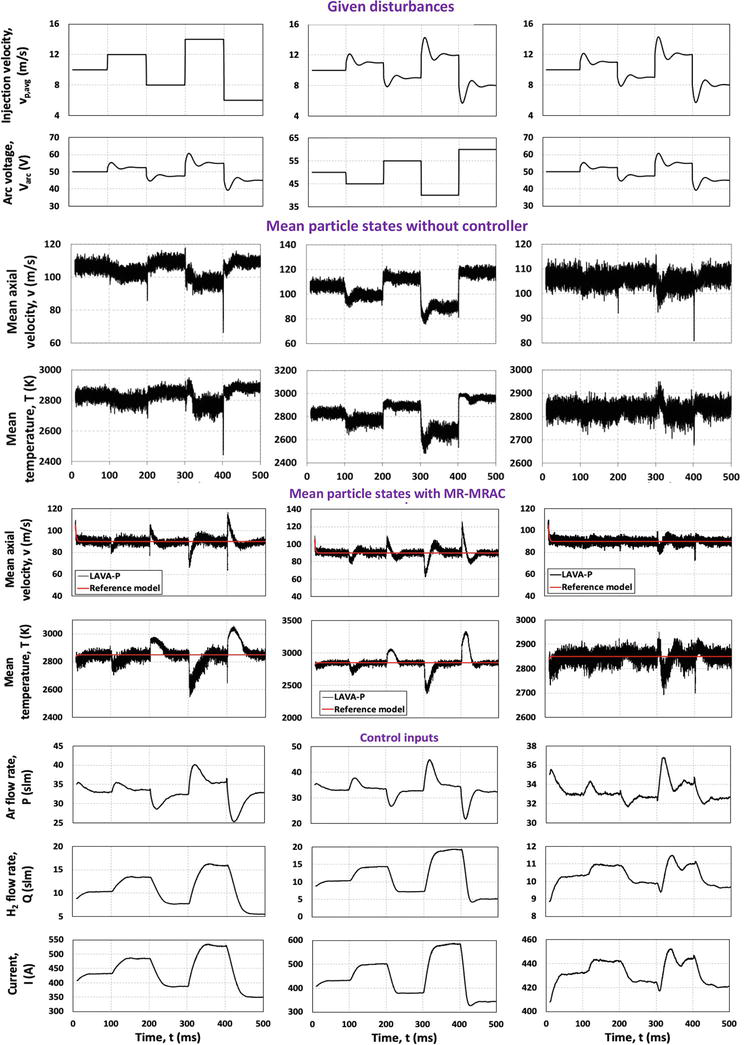
Figure 6.
The closed-loop responses of the MR-MRAC system in the presence of combined disturbances of the average powder injection velocity and the arc voltage.
5. Conclusion
This chapter proposes two modifications to the standard model reference adaptive control (MRAC) to improve the robustness and the fast adaption, and its application to the atmospheric plasma spray process (APSP) to improve repeatability and reproducibility of coating quality and simultaneously decreasing manufacturing costs. The MRAC lacks robustness in the presence of process uncertainties and bounded external disturbances, which is a well-known drawback. This issue is handled by the modified robust MRAC (MR-MRAC) scheme, which consists of sigma-modified adaptive laws of MRAC with a low-pass weight estimated filter. The control objective for the APSP is to get consistency in mean particles’ states, such as mean axial velocity and mean temperature, before impacting the substrate. The performance of this strategy is tested on numerical software LAVA-P simulates the APSP. The MR-MRAC shows better performance compared to standard MRAC under external disturbances. The desired consistency in mean particles’ states is achieved despite artificially induced disturbances by varying control inputs through fast adaption. The smooth variations in the mean particles’ states and control inputs are acquired without generating high-frequency oscillations or steady-state errors.
We anticipate that the MR-MRAC will perform equally well in practical applications and economically enable the production of high-quality coatings. This control architecture also is feasible for other coating methods, such as the HVOF spray process, physical vapor deposition, and chemical vapor deposition.
References
- 1.
Tao G. Multivariable adaptive control: A survey. Automatica. 2014; 50 (11):2737-2764 - 2.
Yucelen T, Haddad WM. Low-frequency learning and fast adaptation in model reference adaptive control. IEEE Transactions on Automatic Control. 2012; 58 (4):1080-1085 - 3.
Egardt B. Stability of Adaptive Controllers. Berlin Heidelberg: Springer; 1979 - 4.
Rohrs C et al. Robustness of continuous-time adaptive control algorithms in the presence of unmodeled dynamics. IEEE Transactions on Automatic Control. 1985; 30 (9):881-889 - 5.
Ioannou PA, Sun J. Robust adaptive control. 1: Upper Saddle River, NJ: PTR Prentice-Hall; 1996 - 6.
Shi Z, Zhao L. Robust model reference adaptive control based on linear matrix inequality. Aerospace Science and Technology. 2017; 66 :152-159 - 7.
Sampath S et al. Thermal spray processing of FGMs. MRS Bulletin. 1995; 20 (1):27-31 - 8.
Williamson R, Fincke J, Chang C. A computational examination of the sources of statistical variance in particle parameters during thermal plasma spraying. Plasma Chemistry and Plasma Processing. 2000; 20 (3):299-324 - 9.
Wan Y, et al., Model and Powder Particle Heating, Melting, Resolidification, and Evaporation in Plasma Spraying Processes. 1999. p. 691-699 - 10.
Fincke JR et al. Diagnostics and control in the thermal spray process. Surface and Coatings Technology. 2001; 146 :537-543 - 11.
Westergård R et al. The erosion and abrasion characteristics of alumina coatings plasma sprayed under different spraying conditions. Tribology International. 1998; 31 (5):271-279 - 12.
Guduri B et al. Adaptive process control for achieving consistent particles' states in atmospheric plasma spray process. SN Applied Sciences. 2021; 3 (3):1-21 - 13.
Guduri B, Batra R. Robust model reference adaptive controller for atmospheric plasma spray process. SN Applied Sciences. 2022; 4 (4):1-10 - 14.
Guduri B, Batra RC. Adaptive control of the atmospheric plasma spray process for functionally graded thermal barrier coatings. Advances in Materials Science and Engineering. 2022; 2022 - 15.
Shang S et al. Effect of turbulence modulation on three-dimensional trajectories of powder particles in a plasma spray process. Journal of Physics D: Applied Physics. 2014; 47 (40):405206 - 16.
Ioannou PA, Datta A. Robust adaptive control: A unified approach. Proceedings of the IEEE. 1991; 79 (12):1736-1768 - 17.
Ioannou PA, Kokotovic PV. Instability analysis and improvement of robustness of adaptive control. Automatica. 1984; 20 (5):583-594 - 18.
Guduri B. Adaptive Process Control for Achieving Consistent Mean Particles' States in Atmospheric Plasma Spray Process. US: Virginia Tech; 2022